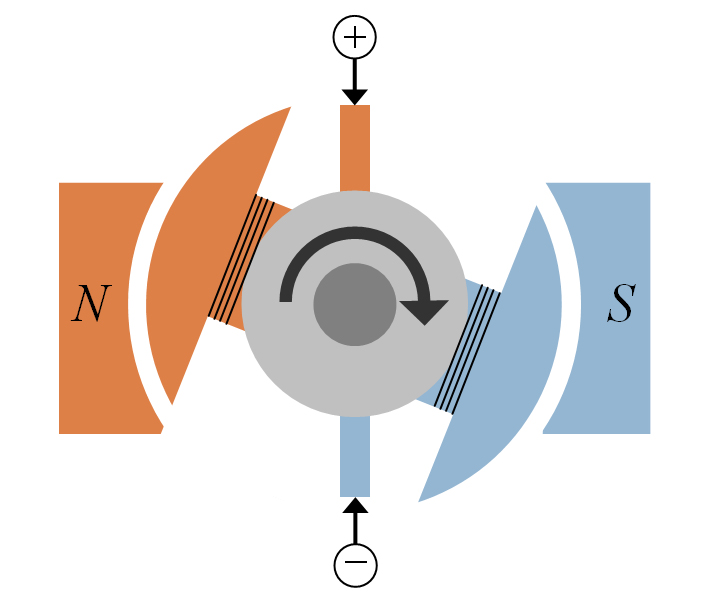
Für einen Gleichstrommotor soll ein Simulationsmodell mittels der Methode der Verallgemeinerten Netzwerke in der Mechatronik aufgestellt und verifiziert werden.
| Leerlaufspannung | UAL | = 24 | V |
| Leerlaufstrom | IAL | = 460 | mA |
| Leerlaufdrehzahl | nL | = 3250 | U/min |
| Ankerwiderstand | RA | = 0.6 | Ω |
Als Simulationsmodell des Gleichstrommotors wird ein Zweitor in Hybridform gewählt.
Dafür können die H-Parameter mittels der experimentellen Versuchsdaten ermittelt werden.
| H11 = 0.6 | Ω | elektrische Verluste |
| H12 = 69.71·10-3 |
Wb | Übertragungsfaktor |
| H21 = -H12 | Übertragungsfaktor (reziproker Wandler) | |
| H22 = 9.44·10-5 | kg m2/s | mechanische Verluste |
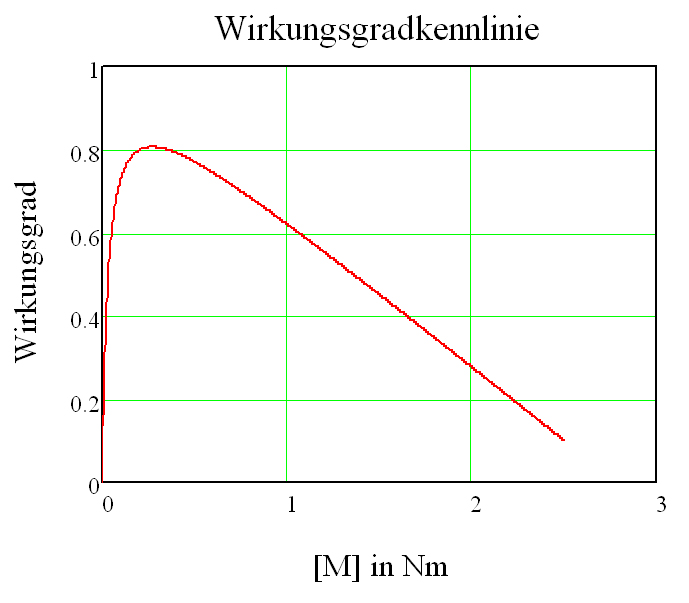
| maximaler Wirkungsgrad | ηmax |
= 0.8 | |
| Strom im Arbeitspunkt | IAP | = 5.8 | A |
| Drehzahl im Arbeitspunkt | nAP | = 2900 | U/min |
| Drehmoment im Arbeitspunkt | MAP | = 0.376 | Nm |