AMESYS - Analyse mechatronischer Systeme
Elektrodynamische Wandler
Gleichstrommotor (GR 80x40, Dunkermotoren)
Für einen Gleichstrommotor soll ein Simulationsmodell mittels der Methode der Verallgemeinerten Netzwerke in der Mechatronik aufgestellt und verifiziert werden.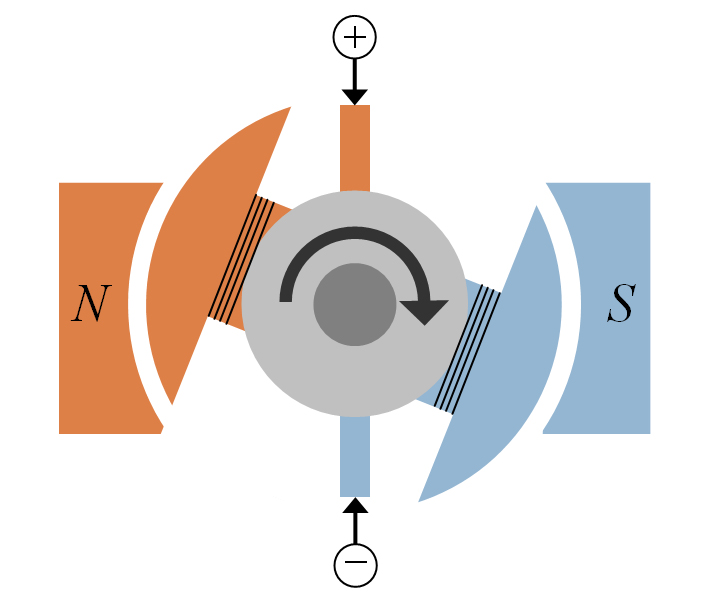
Ausgangsdaten aus dem statischen Versuch und dem Leerlaufversuch
| Leerlaufspannung | UAL | = 24 | V |
| Leerlaufstrom | IAL | = 460 | mA |
| Leerlaufdrehzahl | nL | = 3250 | U/min |
| Ankerwiderstand | RA | = 0.6 | Ω |
Modell
Als Simulationsmodell des Gleichstrommotors wird ein Zweitor in Hybridform gewählt.
Dafür können die H-Parameter mittels der experimentellen Versuchsdaten ermittelt werden.
| H11 = 0.6 | Ω | elektrische Verluste |
| H12 = 69.71·10-3 |
Wb | Übertragungsfaktor |
| H21 = -H12 | Übertragungsfaktor (reziproker Wandler) | |
| H22 = 9.44·10-5 | kg m2/s | mechanische Verluste |
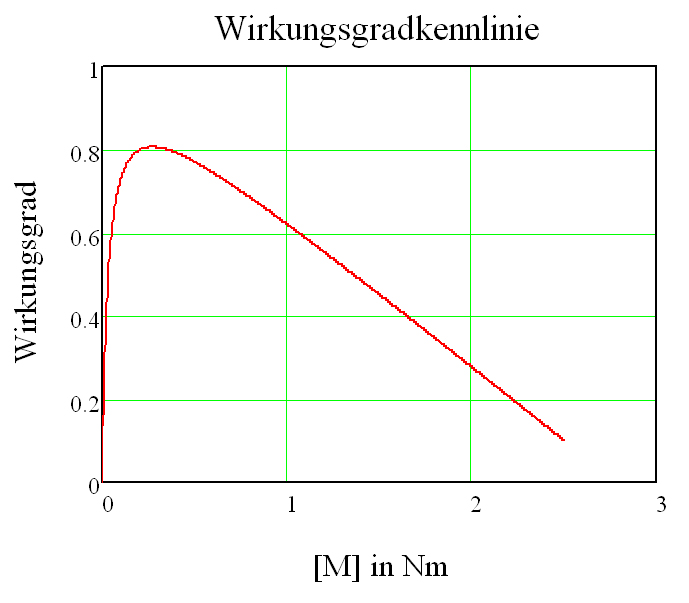
Simulationsergebnisse
| maximaler Wirkungsgrad | ηmax |
= 0.8 | |
| Strom im Arbeitspunkt | IAP | = 5.8 | A |
| Drehzahl im Arbeitspunkt | nAP | = 2900 | U/min |
| Drehmoment im Arbeitspunkt | MAP | = 0.376 | Nm |
Download
News 1
Multipole - Modellbildung technischer Systeme
- Verlag: Springer Vieweg Berlin, Heidelberg
- Erscheinungsdatum: Juni 2023
-
- Softcover ISBN: 978-3-662-67288-4
- eBook ISBN: 978-3-662-67289-1
News 3
Mechatronische Netzwerke
- Verlag: De Gruyter Oldenbourg
- Erscheinungsdatum: Mai 2018
-
- ISBN: 978-3110470840
Powered by CMSimple| Template: ge-webdesign.de| html| css| Login